随着特斯拉FSD迟迟无法在中国市场正式落地,“不造车”的华为似乎已经在国内接过了智能驾驶话题流量的接力棒。为价格战愈演愈烈的中国汽车行业,注入了一股高科技的“诗与远方”。
11月初,华为常务董事余承东与小鹏汽车CEO何小鹏在社交媒体上的一场隔空对话,让AEB自动紧急制动系统再度引发广泛关注,话题出圈。
11月26日,华为车BU拆分独立,成立新公司的消息正式官宣。新公司将引入长安汽车及关联公司投资,股比不超过40%。相关报道称,华为还正与一汽、东风等多家投资方进行沟通洽谈,新公司估值或将高达2500亿元人民币。
11月28日,华为智选车(现已更名“鸿蒙智行”)首款纯电轿车智界S7(配置|询价)正式发售。这款华为与奇瑞合作打造的新车,与改款问界系列车型一样,搭载一颗激光雷达,并配备华为ADS 2.0高阶智驾系统。
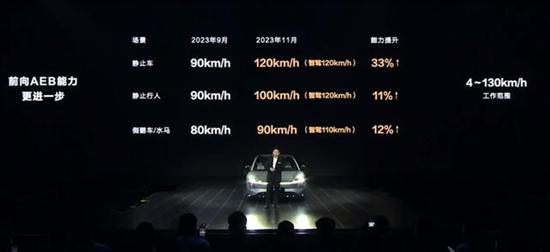
在发布会上,一台智界S7通过远程召唤功能,直接以无人驾驶状态登上舞台。官方同步展示了智界S7无人泊车代驾演示视频,共支持包括机械车位泊车辅助功能在内的超过160种泊车场景;重申2023年年底在全国开放城区NCA智驾辅助计划,并再度在AEB性能上“秀肌肉”——宣布智界S7前向AEB已支持120km/h时速遭遇前方静止车辆时的主动刹停。
随着特斯拉与造车新势力的崛起,华为、小米等数码消费品厂商涌入汽车赛道,智能化竞争已成为电动车竞争的重要领域,而自动驾驶技术显然是每家厂商重兵投入之地。
但在一场场盛大的发布会、一个个炫酷的功能演示视频背后,自动驾驶距离从量变到质变的“iPhone4时刻”恐怕依然还有很长的一段路要走。
AEB争议背后:L2.9与L3之间0.1的暧昧
近几年来,经过马斯克在海外社交媒体上为特斯拉FSD持续造势、国内新势力厂商将激光雷达、领航辅助等自动驾驶软硬件作为品牌标签不断宣传,“自动驾驶”在乘用车领域仿佛呈现“薛定谔的猫”的状态:
一方面,从高速领航到记忆泊车再到近两年热门的城区领航,各种新功能、新概念层出不穷,在厂商的舆论宣传中,似乎真的过不了多久,人类驾驶员就能将方向盘的控制权交给系统,实现完全的“自动驾驶”。
另一方面,在实际市场表现上,NOA高速领航等智能驾驶系统的渗透率未能显著增长,并未获得消费者的广泛认可。而在国内几起相关交通事故发生后,为了避免引起错误的用户认知,各大车企也纷纷将宣传表述中的“自动驾驶”更换成了“高阶智能驾驶”、“高阶辅助驾驶”等词汇,更加强调“辅助”而非“自动”。
为了厘清相关概念,我们还是需要重新回顾由国际汽车工程师协会(SAE)提出的自动驾驶功能的分级。简明直观的说明,可以参考下图:

辨别不同级别区别的简单方式,是看图中握着方向盘的手:L2级别及以下,驾驶员必须时刻把手放在方向盘上,驾驶责任在人类驾驶员身上;L3级别开始,则允许驾驶员一定程度上脱手,驾驶责任也逐渐向车辆,以及生产车辆的厂商转移。
换言之,按照这个标准,从L2“辅助驾驶”到L3“自动驾驶”,目前并没有一个可量化的系统性能参数指标。更多地是在于发生事故后,责任是由驾驶员承担,还是由汽车厂商承担。
于是在现实中,大家就看到了这样一种系统性能与等级“错配”的现象:
2022年5月,奔驰在德国宣布推出了世界上首个L3级自动驾驶系统Drive Pilot,该系统允许在德国境内符合条件的高速公路上开启,行驶速度需低于60km/h,且无法实现自主变道等功能,但允许驾驶员双手离开方向盘并进行适当的娱乐活动,发生事故之后,责任由奔驰承担。

而在中国,华为和蔚小理等厂商已经落地量产的NOA高速领航辅助功能,满足在120km/h小时的速度下开启,车辆能自动实现变道超车、上下匝道等功能,按照导航路线点对点行驶。但这些系统依然要求驾驶员时刻握住方向盘,分级上依然属于L2、L2+,乃至一些厂商宣传中更为夸张的L2.99999……

正如人类驾驶员学开车,通过考试拿到驾照并不意味着就能成为老司机、不出事故。智能驾驶系统即使在能力上已经能够满足部分场景中的“自动驾驶”,但并不意味着就不会出现安全问题。无论车企的企业形象维护还是从更根本的交通安全的角度,如今的智能驾驶系统都还无法迈过从L2.9到L3的这个0.1。
在等级上无法分出孰优孰劣,智能驾驶还是一个“重体验、弱参数”的系统——高速领航、自主泊车等功能都趋于同质,系统究竟好不好用,还得让车主在驾驶过程中开启功能实际体验,车企们也难以在宣传造势中寻找到差异化表述。
于是,厂商们找到了AEB这样一个技术相对“传统”,但却能够直观比较的功能。
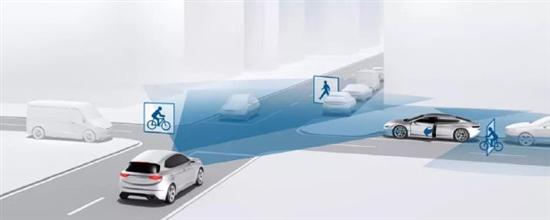
AEB自动紧急制动系统是基于车辆上配置的摄像头、毫米波雷达等感知设备,辨别前方可能与其他交通参与者所发生的碰撞风险,并通过系统自动触发实施制动的主动安全功能。
更为简单的表述,AEB就是在极端条件下,当人类驾驶员由于种种原因,没看到前方的行人、车辆,即将发生事故时,车辆能够自己来一脚急刹车,避免碰撞发生。
从等级划分上来说,AEB属于L1级辅助驾驶功能,是一项已经相对成熟的技术,国内外均有标准的测试标准。与以人工智能决策为基础的智能驾驶所不同的是,目前主流的AEB均以人工写入的决策逻辑为准,类似一种固定的“条件反射”:在特定的车速下,前方有行人等特定的障碍物时,才会触发开启。
这也是为什么许多车辆在C-NCAP、E-NCAP等标准测试中均能取得五星成绩,但是在实际行驶中,或者更复杂的“非标准”测试环境中依然无法刹住车的原因。

抛开整体的交通环境不谈,仅仅只追求AEB单项功能能在更快的时速下开启,实际上也与真实的驾驶行为不符:正如人类开车并不是只有“刹车”这一个动作,更自然的智能驾驶系统,应该是能够提前感知到前方的障碍物等环境信息,及时进行减速、变道绕行等行为。
在余承东与何小鹏的AEB争论的分析中,很多也提到了“误触发”与“漏触发”的问题。由于AEB仅仅只是极端交通场景下的“兜底”技术,驾驶主要责任方依然是人类驾驶员。相比于“漏触发”,避免过于灵敏的“误触发”显得更加重要——毕竟绝大多数情况下,人类驾驶员还是会及时感知风险,避免碰撞事故,过于灵敏的AEB导致的“幽灵刹车”的情况反而会带来更多的追尾隐患。
总之,在L2到L3的分级难以跨越,智能驾驶的体验又难以比较的前提下,AEB系统能以多少时速刹停这个相对客观的“硬指标”,似乎从华为开始,后续会越来越多地出现在汽车厂商的发布会上。
这就像智能手机行业发布会上曾经流行的“跑分”环节,吸引人们的眼球和流量,但究竟有多少价值与意义?